Transfert en cours..., vous êtes sur le "nouveau" serveur data.abuledu.org dont l'hébergement est financé par l'association abuledu-fr.org grâce à vos dons et adhésions !
Vous pouvez continuer à soutenir l'association des utilisateurs d'AbulÉdu (abuledu-fr.org) ou l'association ABUL.
Suivez la progression de nos travaux et participez à la communauté via la liste de diffusion.
Votre recherche ...
Nuage de mots clés
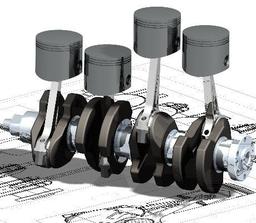
Arbre à vilebrequin
Un ensemble bielle-piston-vilebrequin assure la rotation du moteur. Le piston est l'élément mobile assurant la variation de volume de la chambre de combustion d'un cylindre. Généralement lié à une bielle, il assure la compression des gaz de combustion et subit leur détente, engendrant ainsi un mouvement rotatif du vilebrequin. Lorsque la chambre est ouverte par une soupape, il expulse les gaz brûlés ou aspire le mélange du cycle suivant.
Dessins et plans, Aéronautique, Transports aériens, Gouvernails, Aéronautique -- Instruments, Avions -- Équipement, Avions -- Pilotage, Pilotage (navigation), Vol aux instruments
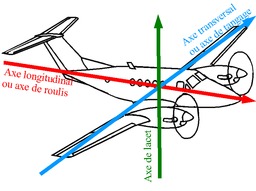
Axes de roulis et de tangage d'un avion
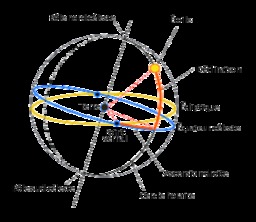
Convention de représentation des axes de roulis, tangage et lacet d'un aéronef (Beech bimoteur). Un avion peut être représenté dans le trièdre de référence formé par : 1) l'axe x : axe longitudinal ou axe de roulis (couleur rouge) ; 2) l'axe y : axe transversal ou axe de tangage (couleur bleue) ; 3) l'axe z : axe de lacet (couleur verte). Le pilote agit sur les gouvernes pour modifier la trajectoire de l'avion dans le plan vertical (montée ou descente) ou dans le plan horizontal (en virage). Pour être équilibré, le virage peut nécessiter une action sur les trois axes. Pour obtenir un mouvement de tangage le pilote actionne le manche qui commande la gouverne de profondeur. Elle est située le plus loin possible de l'aile, sur l'empennage horizontal ou bien sur un plan canard. Pour obtenir un mouvement de roulis le pilote actionne latéralement le manche qui commande les ailerons. Ces gouvernes sont généralement situées le plus loin possible de l'axe de roulis, donc vers l'extrémité des ailes. Pour obtenir un mouvement de lacet le pilote actionne le palonnier (pédales) qui commande la gouverne de direction avec ses pieds. Elle est située le plus loin possible de l'axe de lacet, sur l'empennage vertical. En vol, le palonnier est une commande secondaire dite « de symétrie » qui sert à équilibrer le débit d'air sur les deux ailes de l'avion, et donc à équilibrer la portance. La plupart des avions présentent un couplage en lacet-roulis : on peut commander un mouvement de roulis avec la gouverne de lacet (roulis induit). D'autre part une rotation en roulis entraîne généralement une rotation en lacet en sens inverse du virage demandé (lacet inverse). Source : http://fr.wikipedia.org/wiki/Pilotage_d%27un_avion.
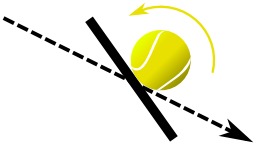
Effet "Coupé" au tennis
Effet coupé au tennis. Une balle coupée est une balle qui va être frappée, avec un mouvement de rotation de l'avant vers l'arrière. Une balle coupée aura ainsi tendance à être ralentie avant et après le rebond (où la vitesse de la balle diminue de 75 %), et à s'écraser (rebond le plus haut dans des conditions similaires). Un coup coupé confère cependant une certaine sécurité, car la balle est bien contrôlée. Le coup le plus facile à couper reste le revers, car le mouvement de raquette du haut vers le bas se fait de façon assez naturelle de ce côté. Utilisé le plus souvent en défense, le coup coupé permet de se sortir de situations difficiles, ou de casser le rythme après un échange dominé par le lift ou les coups à plat. Il est également possible de couper en coup droit, surtout en bout de course, mais le coup droit coupé reste souvent un coup défensif (ou une amortie), alors qu'en revers, il peut être utilisé pour monter au filet, ou réaliser un "passing shot".
Dessins et plans, Tectonique des plaques, Dorsales océaniques, Failles (géologie), Lithosphère, Failles actives
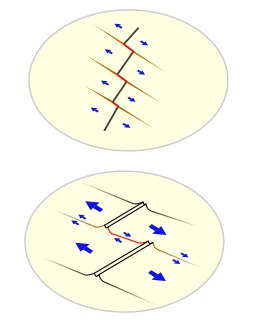
Failles transformantes
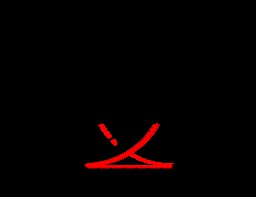
Schéma de fonctionnement des failles transformantes (en rouge) et de leur mouvement (en bleu). Les failles transformantes sont des limites de plaque lithosphérique où il n'y a ni subduction ni création de lithosphère (limite conservative). Elles sont situées en bordure de plaques tectoniques et découpent les dorsales transversalement. La faille transformante agit selon un mouvement de coulissage. Les failles transformantes sont des arcs de cercle car tous les mouvements de plaques lithosphériques sont des rotations (conformément au théorème d'Euler) et ce sont des coulissements entre deux plaques lithosphériques.Tous les 200 à 300 km, ces failles décalent l'axe de la dorsale. Seules les zones qui séparent deux axes subissent une sismicité importante, en raison du déplacement en sens contraire de leur portion de lithosphère.
Force appliquée selon un appui plan
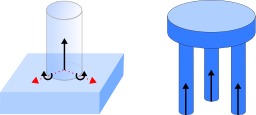
Force appliquée selon un appui plan : la liaison appui plan, appelée aussi liaison plane, présente 3 degrés de liaison. Ils forcent le mouvement à rester dans un plan. Les deux translations et la rotation dans ce plan sont libres. L'appui des trois pieds d’un tabouret sur un sol plan constitue une liaison plane. Le quatrième pied d’une chaise ne touche le sol que si les extrémités des pieds sont parfaitement coplanaires ; le système est alors hyperstatique les liaisons étant en surnombre par rapport au besoin de guidage. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. La liaison mécanique est le modèle utilisé pour décrire cette relation dont la considération est primordiale dans l'étude des mécanismes. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires. Un mécanisme est l'association de plusieurs pièces liées entre elles par des contacts physiques qui les rendent totalement ou partiellement solidaires, selon qu'ils autorisent ou non des mouvements relatifs. Elle emploie des représentations mathématiques qui diffèrent suivant qu'on l'aborde sous l'aspect cinématique (étude des mouvements ou guidages) ou sous l'aspect statique (étude de la transmission d'efforts). La notion de liaison mécanique se définit plus généralement entre groupes de pièces, appelés classes d'équivalence contenant respectivement des pièces entièrement solidaires.
Dessins et plans, Physique, Mouvement rotatoire, Dynamique, Forces (physique), Mouvement rotatoire (dynamique des corps rigides)
Force centripète
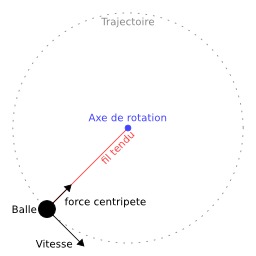
Force centripète : Simple scénario d'une balle accrochée par un fil à un axe et tournant autour de celui-ci. La force exercée par le fil sur la balle est la force centripète qui maintient la balle en mouvement de rotation sur la trajectoire. C'est cette force qui donne au fil sa tension. Le terme force centripète ("qui tend à rapprocher du centre", en latin) désigne une force permettant de maintenir un objet dans une trajectoire circulaire ou, plus généralement, elliptique. En effet, tout objet décrivant une trajectoire elliptique possède en coordonnées cylindriques une accélération radiale non nulle, appelée accélération centripète, qui est dirigée vers le centre de courbure. D'un point de vue dynamique, le Principe Fondamental de la Dynamique (PFD) indique alors la présence d'une force radiale dirigée elle aussi vers le centre de courbure.

Les étoiles et l'étoile polaire
Mouvement apparent des étoiles autour de l’étoile polaire. La nuit, les étoiles apparaissent à l’œil nu sous la forme de points (à cause de leur éloignement) brillants de couleur blanche, parfois aussi rouge, orangée ou bleue — généralement scintillants et sans mouvement apparent immédiat par rapport aux autres objets fixes de la voûte céleste. Le phénomène de scintillation est dû à l’extrême petitesse de la taille angulaire des étoiles (quelques millisecondes d’arc voire moins), qui est inférieure à celle de la turbulence atmosphérique. Source : http://fr.wikipedia.org/wiki/%C3%89toile#Structure_d.E2.80.99une_.C3.A9toile
Mesure d'un tour de roue
Relation entre la rotation d'une roue et l'avance d'un véhicule : longueur de l'arc de cercle. En un tour de roue, on avance d'une longueur correspondant au périmètre.
Dessins et plans, Terre, Terre -- Rotation, Point vernal, Équinoxe de printemps, Nutation, Cônes, Précession, Toupies (jouets)
Mouvement de précession de la Terre
La précession des équinoxes est le lent changement de direction de l'axe de rotation de la Terre. Ce changement de direction est provoqué par le couple qu'exercent les forces de marées de la Lune et du Soleil sur le renflement équatorial de la Terre. Ces forces tendent à amener l'excès de masse présent à l'équateur vers le plan de l'écliptique. La Terre étant en rotation, ces forces ne peuvent changer l'angle entre l'équateur et l'écliptique mais provoquent un déplacement de l'axe de rotation de la Terre dans une direction perpendiculaire à cet axe et au couple. Mis à part les petites perturbations agissant sur ce déplacement (par exemple la nutation), l'axe de la Terre décrit la surface d'un cône ou « entonnoir » à la manière d'une toupie. Ce mouvement aboutit à déplacer l'orientation du pôle Nord parmi les étoiles, en sorte que, au fil des siècles, nous changeons d'étoile polaire. Ce mouvement de l'axe des pôles terrestres entraîne avec lui celui de l'équateur, et de ce fait, le point vernal, ou point équinoxial, précède chaque année sa position antérieure sur l'équateur par rapport à l'écliptique. Pour cette raison ce mouvement est appelé précession des équinoxes. Le point équinoxial effectue de la sorte à reculons un tour complet de l'écliptique en plus ou moins 25 800 années et l'axe de la Terre décrit en ce même temps un cône complet.

Gravure, Boxeurs, Boxe, Douze (le nombre), Disques, Mouvement rotatoire, Illusions d'optique, Jouets optiques, Eadweard Muybridge (1830-1904), Art cinétique, Mouvement
Phénakistiscope de la boxe
Eadweard Muybridge (1830-1904). Le phénakistiscope (mot formé du grec phenax -akos, "trompeur", et skopein, "examiner") est un jouet optique donnant l'illusion du mouvement fondé sur la persistance rétinienne. Il a été inventé par le Belge Joseph Plateau en 1832. Il comporte un disque en carton, percé de dix à douze fentes, sur lequel un mouvement est décomposé en une séquence d'images fixes, et un manche permettant son maintien pendant sa rotation. Pour percevoir le mouvement, le spectateur se place en face d'un miroir et positionne ses yeux au niveau des fentes du disque, du côté opposé aux dessins. Il fait ensuite tourner le carton. Les fentes servent d'obturateur en ne laissant apparaître l'image reflétée dans le miroir qu'un très court instant. L'œil ne voit donc que des images fixées par la persistance rétinienne, s'animant les unes après les autres, ce qui reconstitue le mouvement lorsque le disque tourne à une vitesse suffisante. Source : http://fr.wikipedia.org/wiki/Ph%C3%A9nakistiscope
Point vernal et coordonnées équatoriales
Sur la sphère céleste, l'équateur et l'écliptique se croisent. Les deux intersections sont appelées des nœuds. Au cours de son mouvement apparent, le Soleil croise ces deux points, l'un en passant de l'hémisphère Nord à l'hémisphère Sud, c'est le nœud descendant ; l'autre en passant de l'hémisphère Sud à l'hémisphère Nord, c'est le nœud ascendant. Ce dernier est le point vernal (noté γ, parfois g), parfois noté point de l'équinoxe vernal ou point de l'équinoxe de printemps. Les références du système de coordonnées équatoriales sont d'une part le méridien passant par le point vernal, il définit le méridien zéro pour la mesure des ascensions droites, et d'autre part l'équateur céleste à partir duquel la déclinaison est mesurée (positivement au-dessus de l'équateur, négativement en dessous). Les coordonnées du point vernal sont l'ascension droite (α) = 0 h (étant situé sur le méridien zéro) et sa déclinaison (δ) est nulle (étant situé sur l'équateur céleste). Le point vernal étant défini comme le croisement de l'écliptique et de l'équateur céleste, il change de position avec les mouvements de précession et de nutation de l'axe de rotation de la Terre. Ces paramètres sont déterminés par l'"International Earth Rotation and Reference Systems Service" (IERS) en combinant les données fournies par un réseau de surveillance mondial. En raison des mouvements du point vernal, ce sont ses coordonnées J2000.0, c'est-à-dire au 1er janvier 2000 à midi UTC, qui servent de référence pour le système de coordonnées équatoriales.

Photographie, Mouvement rotatoire (dynamique des corps rigides), Rotation (dynamique), Sète (Hérault), Architecture (1945-....), Ponts -- France, Ponts -- Tabliers, Ponts basculants
Pont à bascule
Le pont du Tivoli (pont à bascule), en position fermé, depuis le quai des Moulins. La partie centrale est le contrepoids. Construction du pont de 1949 à 1951 par les Établissements Daydé. Sète, Hérault. Un pont basculant est un pont mobile dont le tablier peut se relever par rotation. Source : http://fr.wikipedia.org/wiki/Pont_basculant
Dessins et plans, Mouvement de rotation, Mouvement de translation (physique), Mouvement rotatoire, Mouvements, Plans de translation
Quatre types de mouvements plans
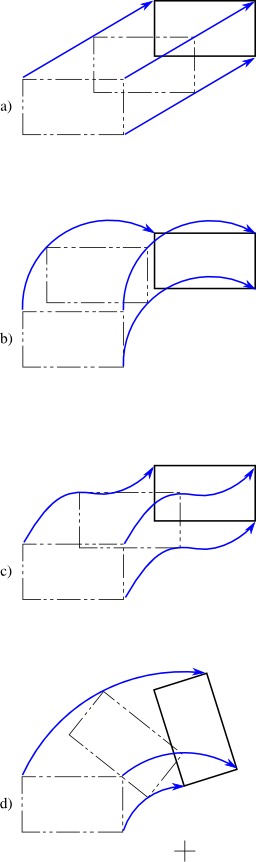
4 types de mouvements plans : a = translation rectiligne ; b = translation circulaire ; c = translation curviligne ; d = rotation.
Dessins et plans, Terre -- Rotation, Point vernal, Temps, Mesure du, Équinoxe de printemps, Nutation
Théorie de la nutation
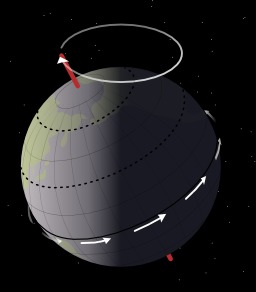
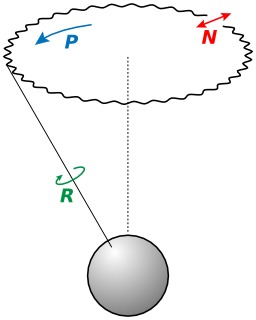
Schéma du mouvement de l'axe d'une planète : R (vert) - Rotation, P - Précession (bleu), N - Nutation en oblique (rouge). S'applique à la Terre. La nutation est un balancement périodique de l'axe de rotation de la Terre autour de sa position moyenne, qui s'ajoute à la précession. Due à l'attraction conjuguée du Soleil et la Lune, la nutation se traduit par une oscillation de l'axe de rotation de la Terre pouvant aller jusqu'à 17,2" (secondes d'arc) avec une période de 18,6 ans, qui est égale à celle de la précession du nœud ascendant de l'orbite lunaire. Le pôle vrai dessine alors autour du pôle moyen une ellipse dont le grand axe mesurant 9,21" est dirigé vers le point vernal. Classiquement, la nutation est décomposée en deux composantes : Nutation en longitude, décrivant l'oscillation du point vernal vrai autour du point vernal moyen et Nutation en obliquité, décrivant l'oscillation de l'équateur vrai autour de l'équateur moyen.

Une bicyclette
Une bicyclette, ou un vélo, est un véhicule terrestre composé de deux roues alignées (d'où le nom « bicyclette »). La force motrice est fournie par son conducteur (appelé « cycliste »), en position le plus souvent assise, par l'intermédiaire de deux pédales entraînant la roue arrière par une chaîne. La bicyclette est l'un des principaux moyens de transport dans de nombreuses parties du monde. Sa pratique, le cyclisme, constitue à la fois un usage quotidien, un loisir populaire et un sport. Par rapport à la marche, le vélo est trois fois plus efficace à effort égal et entre trois et quatre fois plus rapide. Il a été également calculé qu'en termes de conversion en mouvement de l'énergie issue de la nourriture, il s'agit d'une forme de locomotion plus efficace que celle de n'importe quel organisme biologique. La bicyclette ne dispose que de deux points d'appui au sol : elle se trouve nécessairement en équilibre instable. On parle d'équilibre métastable, car le passage de la position d'équilibre temporaire à une position de déséquilibre perceptible est relativement lent. Les principales forces en action sont : la gravité, qui tend à attirer le vélo vers le sol ; la force centrifuge, qui lorsque le vélo vire, tend à le redresser vers l'extérieur du virage. L'équilibre est maintenu dynamiquement par les actions du cycliste, qui s'emploie à toujours redresser sa machine en la faisant tourner légèrement dans la direction où elle commence à tomber. Le cycliste jongle donc en permanence entre ces deux forces pour compenser les effets de l'une avec l'autre et réciproquement. Il est aidé en cela par la chasse du vélo : il s'agit de la distance entre l'intersection de l'axe de la fourche avec le sol et du point de contact de la roue avant au sol. En effet, l'axe de la fourche est incliné de manière à ce que son intersection avec le sol se trouve en avant du point de contact de la roue avec le sol. Ainsi, si le vélo est penché d'un côté, la roue avant va être forcée à se placer de manière à faire tourner le vélo du même côté, engageant ainsi un virage tendant à équilibrer cette inclinaison. Enfin, on peut noter que lorsque le vélo roule, l'effet gyroscopique lié à la rotation des roues vient contrarier toute variation de la position de leurs axes. Ce phénomène est proportionnel à la vitesse de rotation des roues et à leur masse. Cet effet reste habituellement négligeable et est normalement imperceptible par le cycliste. En effet, la masse et donc l'inertie du vélo et de son pilote sont d'un ordre de grandeur supérieur à celle des roues, ce qui réduit considérablement l'influence de l'effet gyroscopique. Lorsque la vitesse augmente, l'effet gyroscopique augmente en proportion et devient plus perceptible.
Vecteur vitesse angulaire
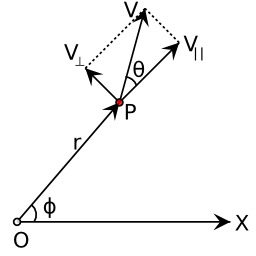
Le vecteur vitesse angulaire d'une particule au point P par rapport à l'origine O est déterminé par la composante orthogonale du vecteur vitesse v. La vitesse angulaire d'une particule est mesurée par rapport ou relativement à un point, appelé origine. Comme indiqué sur la figure (avec les angles phi et heta en radians, si l'on trace une droite depuis l'origine (O) jusqu'à la particule (P), alors le vecteur vitesse (v) de la particule a une composante le long de la droite (composante radiale, v∥) et une composante orthogonale (v_perp). Si la composante radiale est nulle, la particule se déplace sur un cercle, alors que si la composante orthogonale est nulle, la particule se déplace sur une ligne droite passant par l'origine. Un mouvement radial n'induit aucun changement dans la direction de la particule par rapport à l'origine, c'est pourquoi, lorsque l'on s'intéresse à la vitesse angulaire, la composante radiale peut être ignorée. Ainsi, la rotation est entièrement produite par le mouvement orthogonal relativement à l'origine, et la vitesse angulaire est entièrement déterminée par cette composante.